PlcTaglistConverter
Nach langer Entwicklungszeit darf ich hier mal ein weiteres Produkt vorstellen. Denke es gehört in die Kategorie “endlich gibt es sowas”…
Kurz mal mit Vorgeschichte:
Ich selbst beschäftigte mich längere Zeit mit SPS-Programmieren. Davor Schwerpunkt EPLAN-Administration. Da liegt es nahe auch hier den Prozess so gut wie möglich zu optimieren.
Aber mit EPLAN Boardmitteln ist das sehr schwierig. Der Export/Import von Zuordnungslisten lässt zu wünschen übrig, der Workaround über Beschriftung ist eher suboptimal.
Warum gibt es keine Funktion von EPLAN bzw. eine Anwendung welche mir das Importieren / Exportieren von einem beliebigen System ins Nächste ermöglicht? Und ich spreche ich auch von z.B. Siemens Simatic Manager zu Beckhoff TwinCAT…
Darum haben wir uns entschlossen solch ein Projekt zu starten und es ist einfach toll geworden.
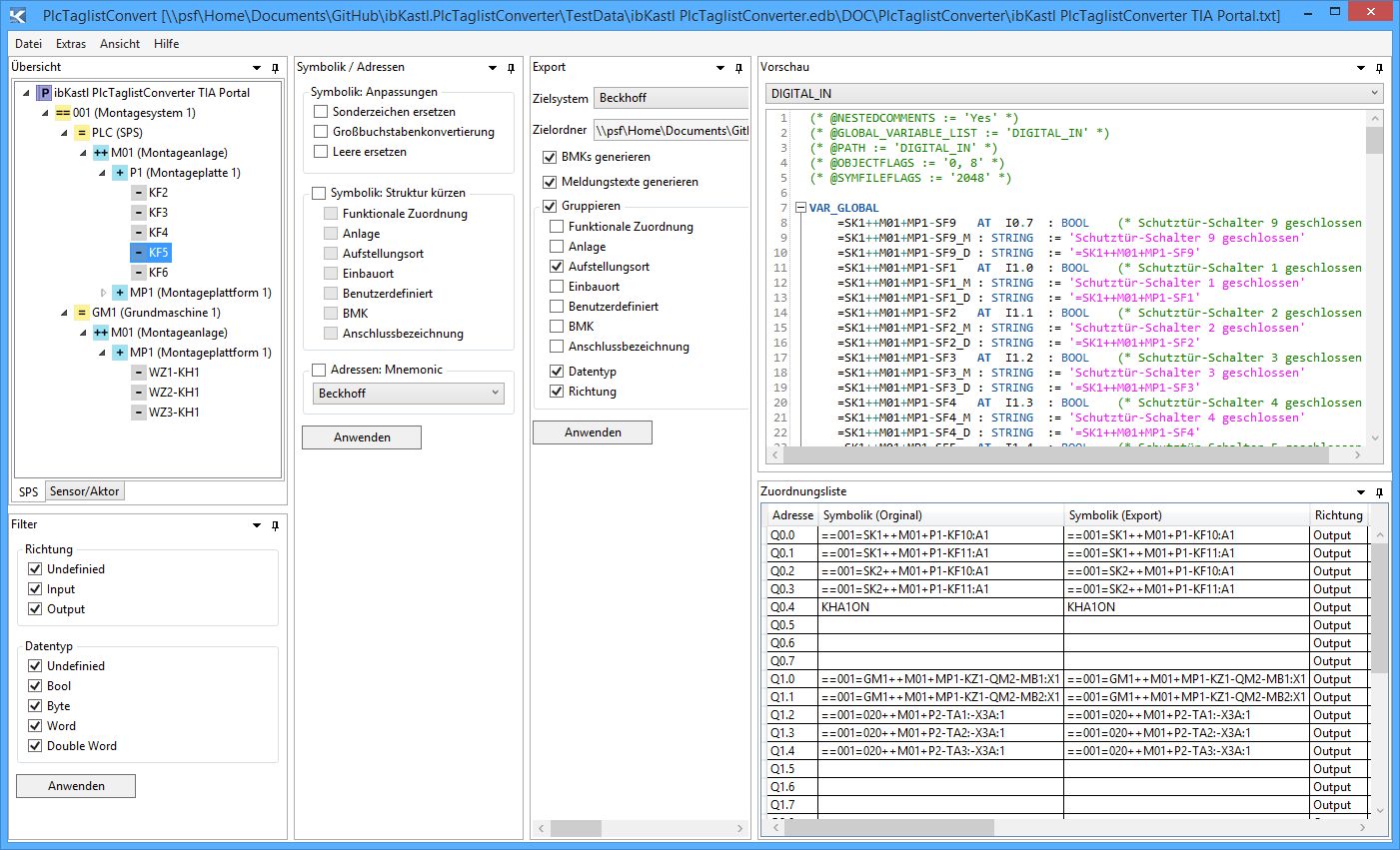
Funktionsübersicht:
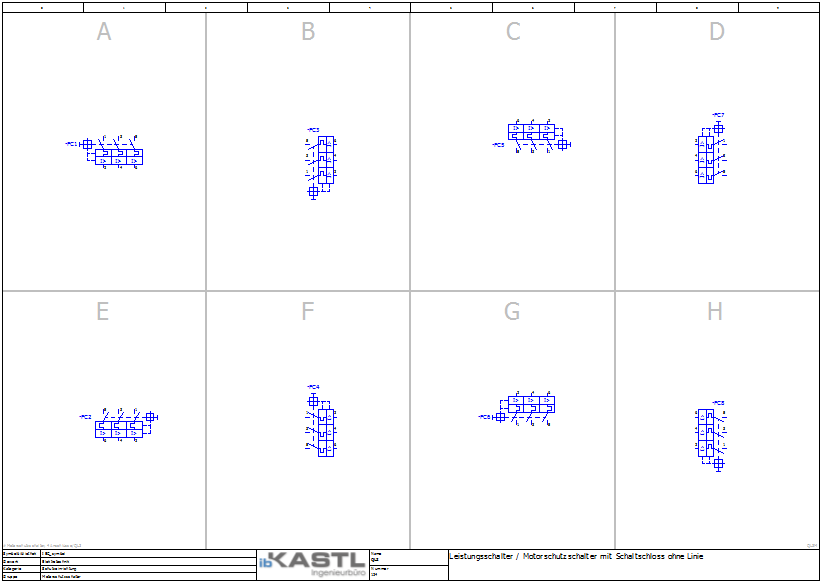
- Import / Export von unterschiedlichen SPS-Systemen
- Siemens Simatic Manager
- Siemens TIA Portal
- Beckhoff TwinCAT
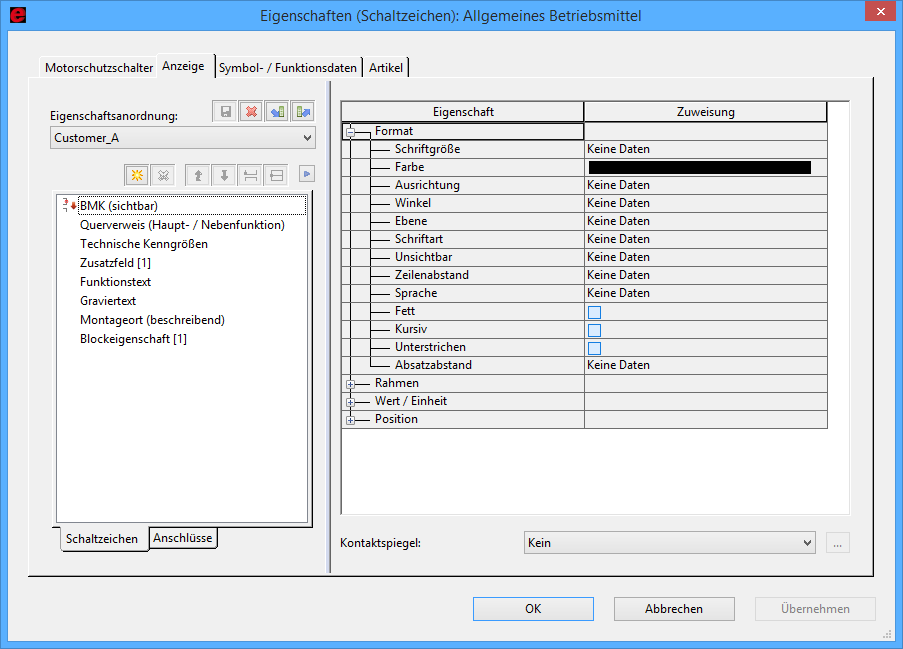
- Anpassung der Symbolik
- Großbuchstabenkonvertierung
- Sonderzeichenersetzung
- Kürzung der Symbolik (Betriebsmittelkennzeichen)
- Beckhoff: Generierung von Variablen
- Meldungstexte
- Betriebsmittelkennzeichen
- Sprungfunktion nach EPLAN
- Sensor / Aktor
- SPS-Übersicht
- Anpassung des Adressformates (Mnemonik)
- Sprachauswahl für Funktionstexte (Kommentare)
- Filterfunktionen nach Eigenschaften des SPS-Anschlusses
- Gruppierter Export
- Live-Vorschau
- Baumdarstellung
- SPS-Übersicht
- Sensor / Aktor